Build One Trajectory
In this example, we will build one trajectory from a definition file, create an interpolator, and use that interpolator to generate a graph.
Trajectory Definition
Trajectories are defined in YAML files as either a series of waypoints, or simple periodic functions. Here we will look at a typical waypoint trajectory:
# A simple waypoint trajectory with prefix and suffix
# Top-level settings
settings:
traj_type: 'direct' # Types include: 'waveform', 'interp', 'direct'
# Place all of the type-specific settings in here
config:
setpoints:
# [time, finger1, finger2, n/c, n/c]
main:
- [0.0, 10, 12, 14, 16]
- [1.0, 20, 0, 0, 0]
- [2.0, 0, 20, 0, 0]
- [3.0, 0, 0, 20, 0]
- [4.0, 0, 0, 0, 20]
- [5.0, 10, 12, 14, 16]
prefix:
- [0.000, 0, 0, 0, 0]
- [1.0, 10, 12, 14, 16]
suffix:
- [2.000, 10, 12, 14, 16]
- [3.0, 0, 0, 0, 0]
All trajectories can have three component:
prefix- Runs once at the beginning of the trajectorymain- Can be looped over and over (ensure the first and last waypoint are equal)suffix- Runs once at the end of the trajectory
Within each trajectory component, each waypoint is defined as a list:
arg #0 - Time (in seconds)
args #1-N - Waypoint values for each signal
Trajectory Builder
We need to build this trajectory before we can use it. To do this, we use a TrajBuilder object, and give it a file to load the definition from.
file_to_use = 'traj_setup/setpoint_traj_demo.yaml'
builder = sorotraj.TrajBuilder() # Make a traj-builder object
builder.load_traj_def(file_to_use) # Load the file
traj = builder.get_trajectory()
Note
We can also directly load a trajectory definition py passing a dictionary to the TrajBuilder: builder.set_definition(def_dict)
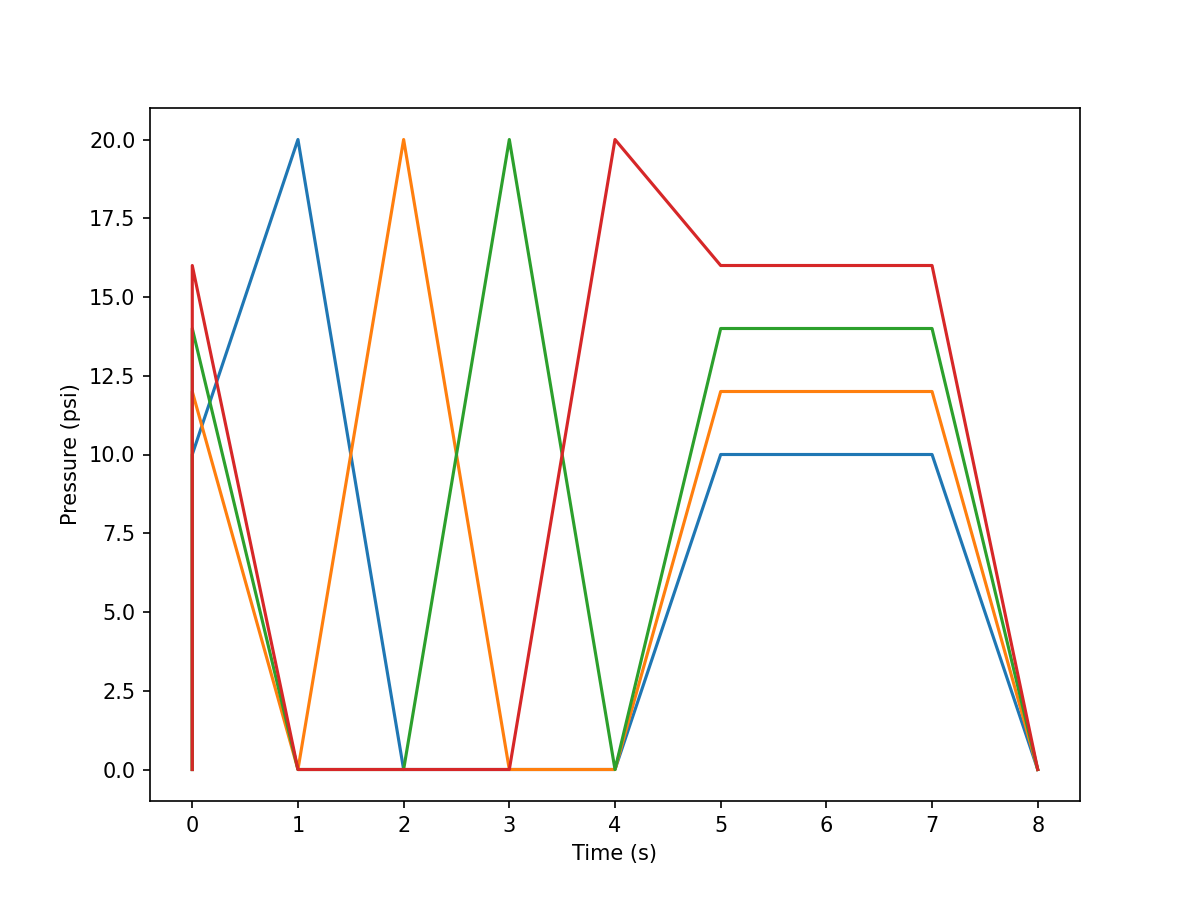
Now that we have the trajectory (traj), let’s plot it:
builder.plot_traj()
Trajectory Interpolator
Now we want to create an interpolator so we can have a convenient way to get trajectory values given arbitrary values of time. We do this with an Interpolator object. Here, we want to get an interpolator function that loops the main trajectory component 2 times, with a speed factor of 1.0 (times as defined in the definition), and invert signals 1 and 3 (these are indices).
interp = sorotraj.Interpolator(traj)
# Get the actuation function for the specified run parameters
actuation_fn, final_time = interp.get_traj_function(
num_reps=2,
speed_factor=1.0,
invert_direction=[1,3])
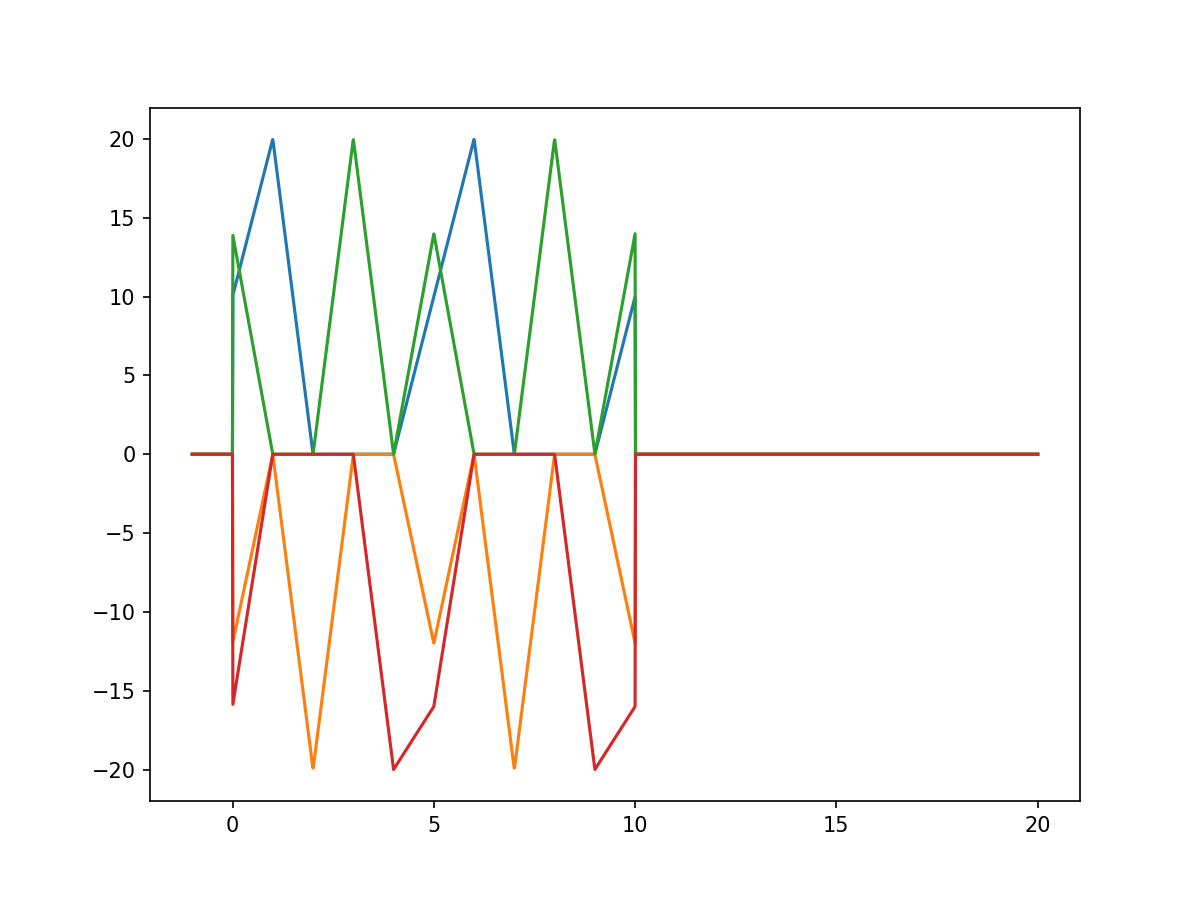
Now that we have an interpolation function we can input a time (or vector of times) and obtain the trajectory at arbirary times. This function is useful when performing simulations of soft systems.
In this example, we go from -1 (before the start of the trajectory) to 20 sec. (well beyond the end of the trajectory).
times = np.linspace(-1,20,2000)
vals = actuation_fn(times)
plt.figure(figsize=(8,6),dpi=150)
plt.plot(times, vals)
plt.show()
Full Code
Here’s the whole example in one file:
import sorotraj
import numpy as np
import matplotlib.pyplot as plt
#file_to_use = 'traj_setup/setpoint_traj_demo.yaml' # Basic demo
#file_to_use = 'traj_setup/setpoint_traj_demo_err0.yaml' # duplicate time (will throw exception)
#file_to_use = 'traj_setup/setpoint_traj_demo_err1.yaml' # non-monotonic time (will throw exception)
#file_to_use = 'traj_setup/setpoint_traj_demo_0.yaml' # empty prefix
file_to_use = 'traj_setup/setpoint_traj_demo_1.yaml' # single line prefix
#file_to_use = 'traj_setup/waveform_traj_demo.yaml' # single prefix line
# Build the trajectory from the definition file
builder = sorotraj.TrajBuilder()
builder.load_traj_def(file_to_use)
traj = builder.get_trajectory()
for key in traj:
print(key)
print(traj[key])
# Plot the trajectory
builder.plot_traj(fig_kwargs={'figsize':(8,6),'dpi':150})
# Make an interpolator from the trajectory
interp = sorotraj.Interpolator(traj)
# Get the actuation function for the specified run parameters
actuation_fn, final_time = interp.get_traj_function(
num_reps=2,
speed_factor=1.0,
invert_direction=[1,3])
print("Final Interpolation Time: %f"%(final_time))
# Get the cycle function for the specified run parameters
cycle_fn = interp.get_cycle_function(
num_reps=2,
speed_factor=1.0,
invert_direction=[1,3])
# Plot the actuation function vs. time
times = np.linspace(-1,20,2000)
vals = actuation_fn(times)
plt.figure(figsize=(8,6),dpi=150)
plt.plot(times, vals)
plt.show()
abs_times = builder.get_absolute_times(num_reps=2, speed_factor=1.0)
abs_vals = actuation_fn(abs_times)
print("Times")
print(abs_times)
traj_flat = builder.get_flattened_trajectory(num_reps=2, speed_factor=1.0, invert_direction=[1,3])
print(traj_flat)